[物件偵測] S10: YOLO v3 簡介
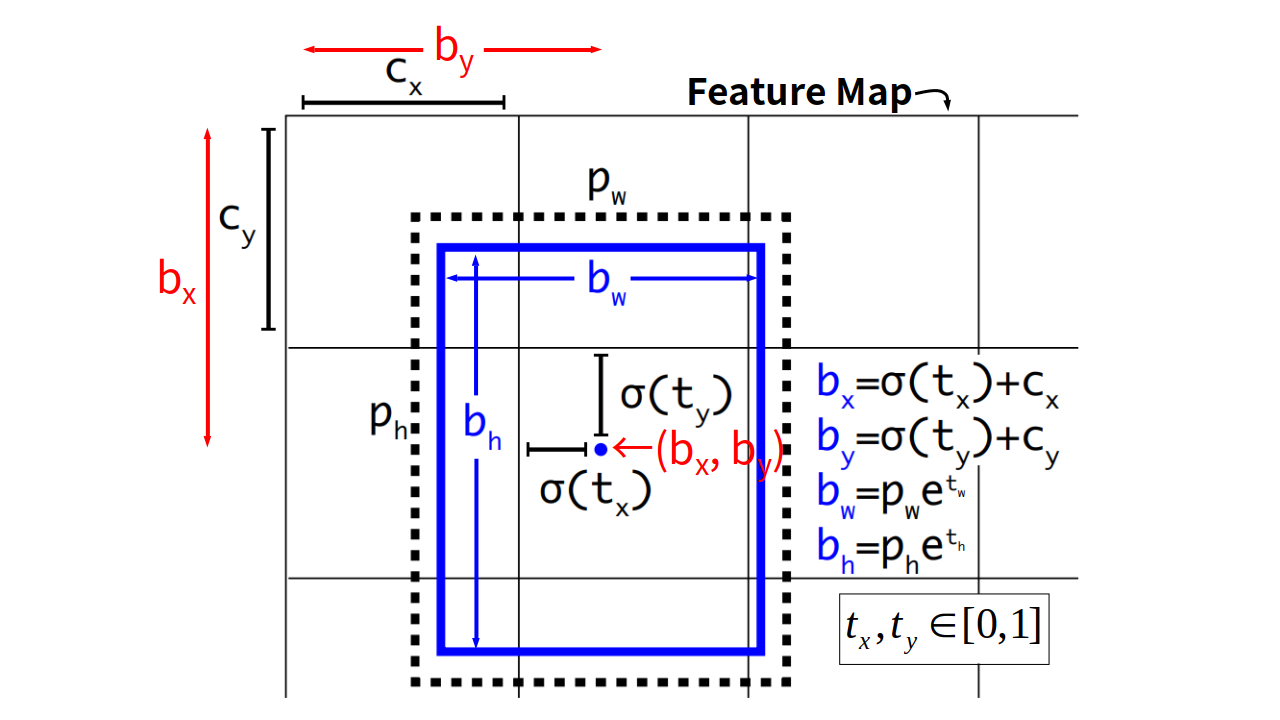
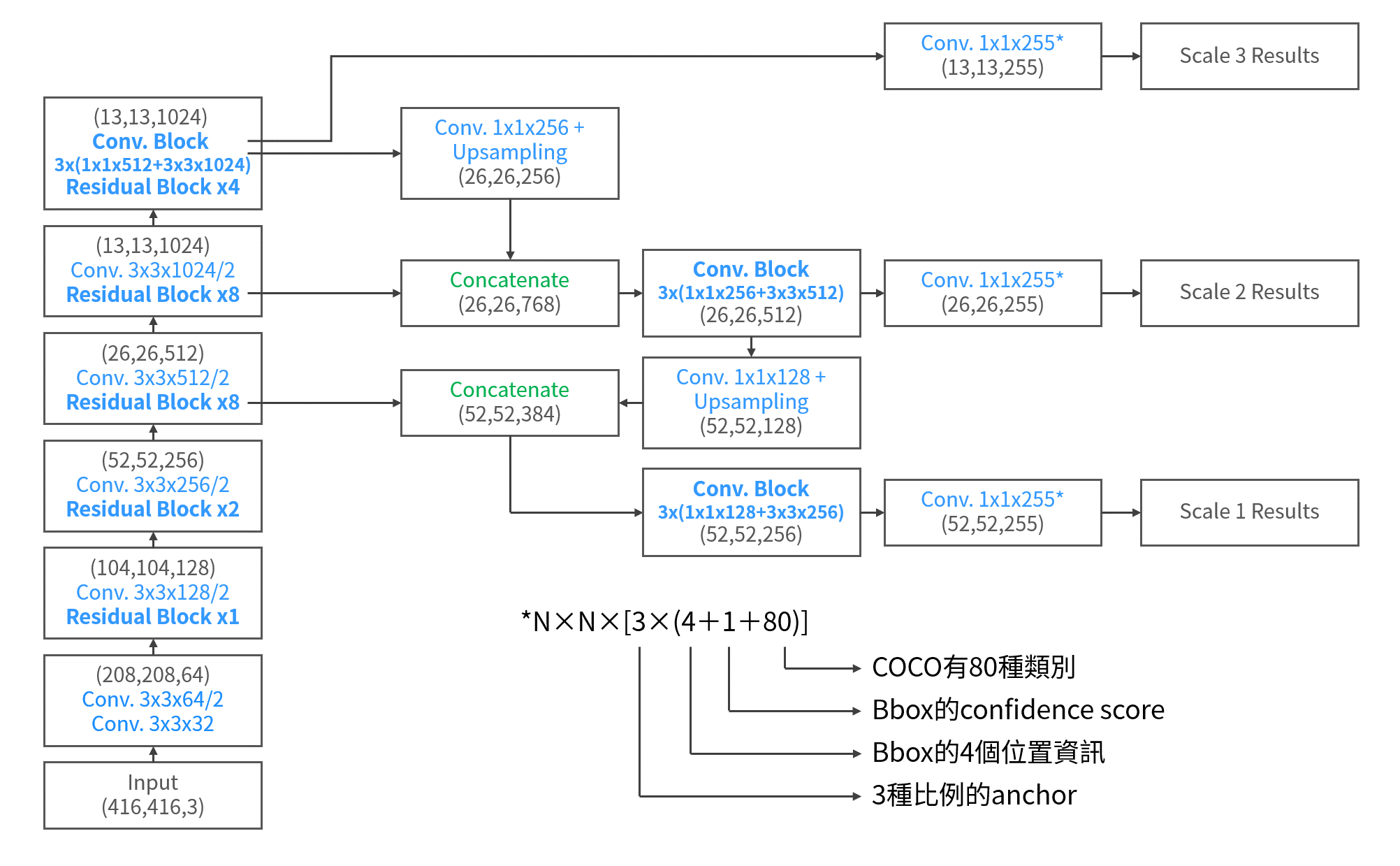
前言 這總算是近期的最後一篇物件偵測論文的介紹文。作者寫這篇論文的時候就提到,他當時沒有繼續花太多心力在改進YOLO系列的演算法上。這次只是稍稍加了一點東西進來,產生YOLO系列的第三代,所以就以比較輕鬆的「技術報告」來呈現他所引入和嘗試的方法。這些改進主要圍繞在邊界框預測、分類預測、backbone網路的改良。

前言 這總算是近期的最後一篇物件偵測論文的介紹文。作者寫這篇論文的時候就提到,他當時沒有繼續花太多心力在改進YOLO系列的演算法上。這次只是稍稍加了一點東西進來,產生YOLO系列的第三代,所以就以比較輕鬆的「技術報告」來呈現他所引入和嘗試的方法。這些改進主要圍繞在邊界框預測、分類預測、backbone網路的改良。
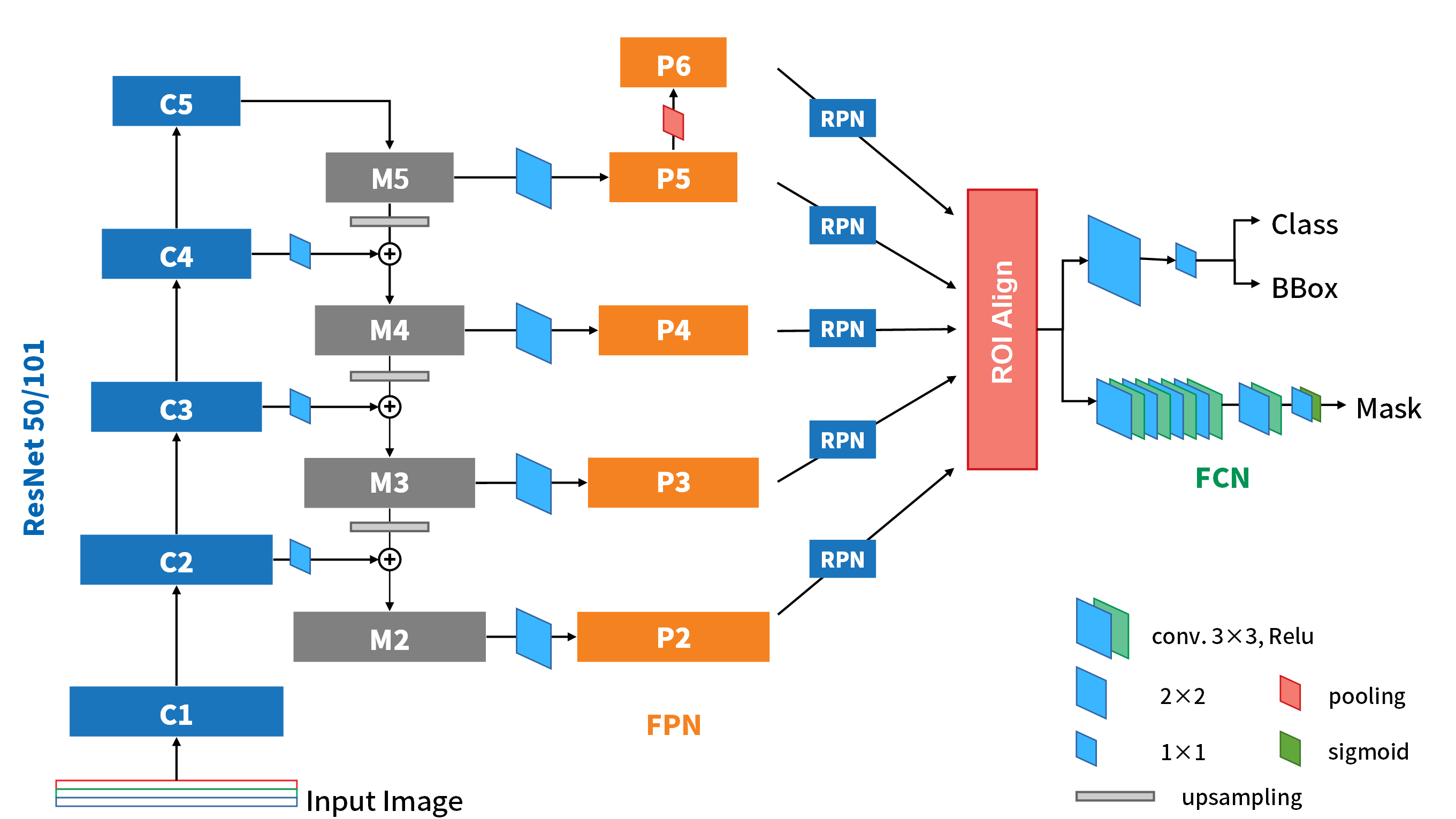
前言 物件辨識發展到現在,透過我們前面所介紹的這些方法,總算是產生了一個集大成的模型-Mask R-CNN。他集結了Faster R-CNN的two-stage模型,再加上FPN的方法利用不同維度下特徵層級高的feature maps來進行預測,也改良Faster R-CNN中ROI Pooling的缺點,使其邊...
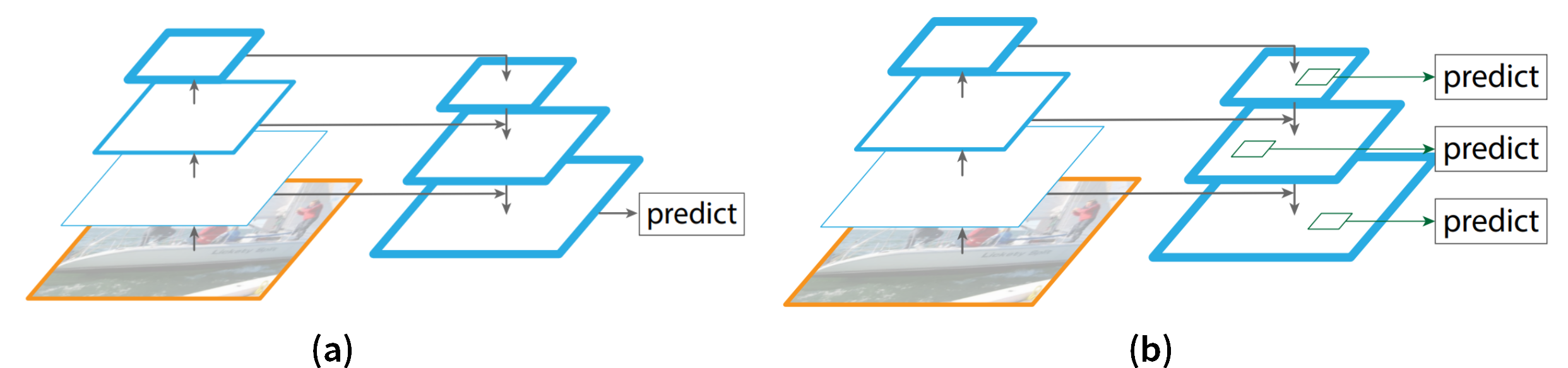
前言 不同的物體或他們的特徵在不同的影像上或是在影像中的大小(或尺度)都有所不同,所以當我們在進行影像的工作時,只在單一個尺度下進行影像處裡或是特徵提取,往往會是不夠的。因此,影像金字塔一直都是解決不同尺度的問題時常用的手段。而在深度學習基底上的物件偵測模型,要實際運用或參加競賽時,往往也都倚賴將整個模型與影像金...
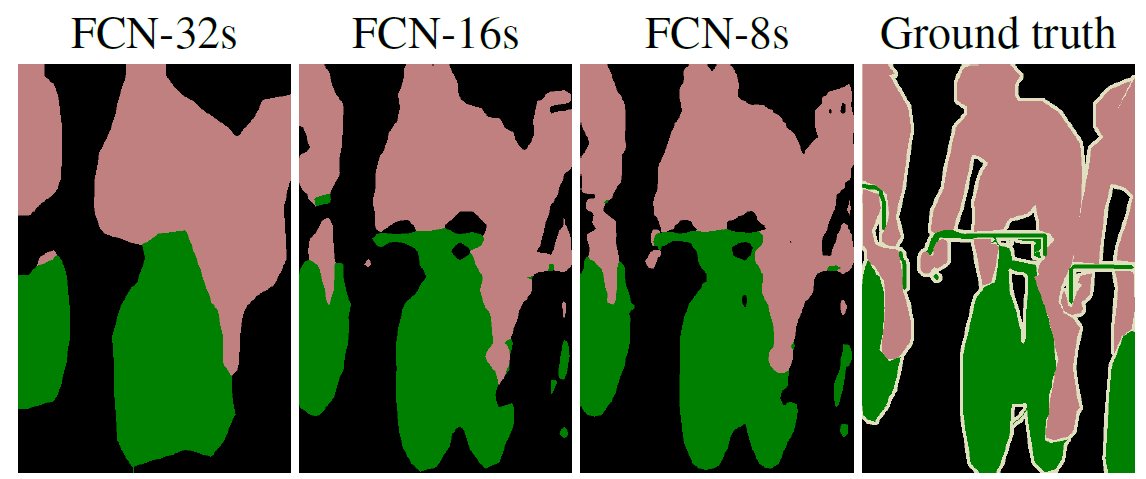
前言 拖了很久才繼續產出新的介紹文分享給大家。這次要來說說物件辨識發展的過程中也佔有一席之地的Semantic Segmentation是什麼,以及這其中代表的方法—Fully Convolutional Networks (FCN)是怎麼透過全卷積的網路來實現這個目標的。 論文: Fully convoluti...
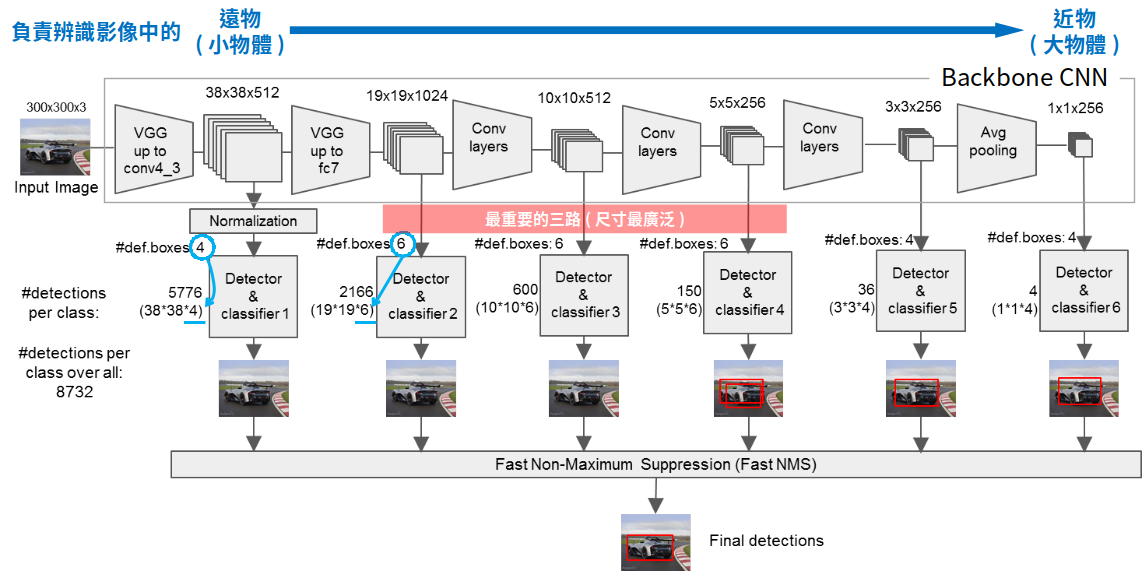
前言 在two-stage模型中,雖然發展到了Faster R-CNN利用兩個網路來進行物件偵測已經相當成熟,但是網路的架構龐大、構造複雜,運算時間也是難以達到真正的real-time運用。而SSD作為一個在2016年發表的相當經典的one-stage模型,一樣透過一個一條龍的完成物件的分類和定位。他用的方法也是...
前言 YOLO v1 用非常直覺的方式設計了網路的運作,讓網路從輸出到輸入直接給出分類的機率與邊界框的位置,而且速度遠遠比two stage的模型要快得多。不過準確度卻還差強人意。因此YOLO v2這次參考了Faster R-CNN中anchor的概念而做了改進,也對feature map的使用做了改善。這次我們...
這篇是對 Mask R-CNN 的應用—餅乾辨識器,辨識樂事和多利多滋兩種餅乾的包裝。因為還沒時間換成中文,就直接貼 github 的 README.md 過來先頂一下。
前言 在前面我們曾提過物件辨識現在有one-stage和two-stage兩大類的方法。之前介紹過的R-CNN系列都是屬於two-stage的方法,因為他們都需要先得到region proposal才能對物體進行定位,進而辨別。然而這樣的方法總歸因為多了一層處理proposals的結構,雖然辨識效果很好,但是往往...
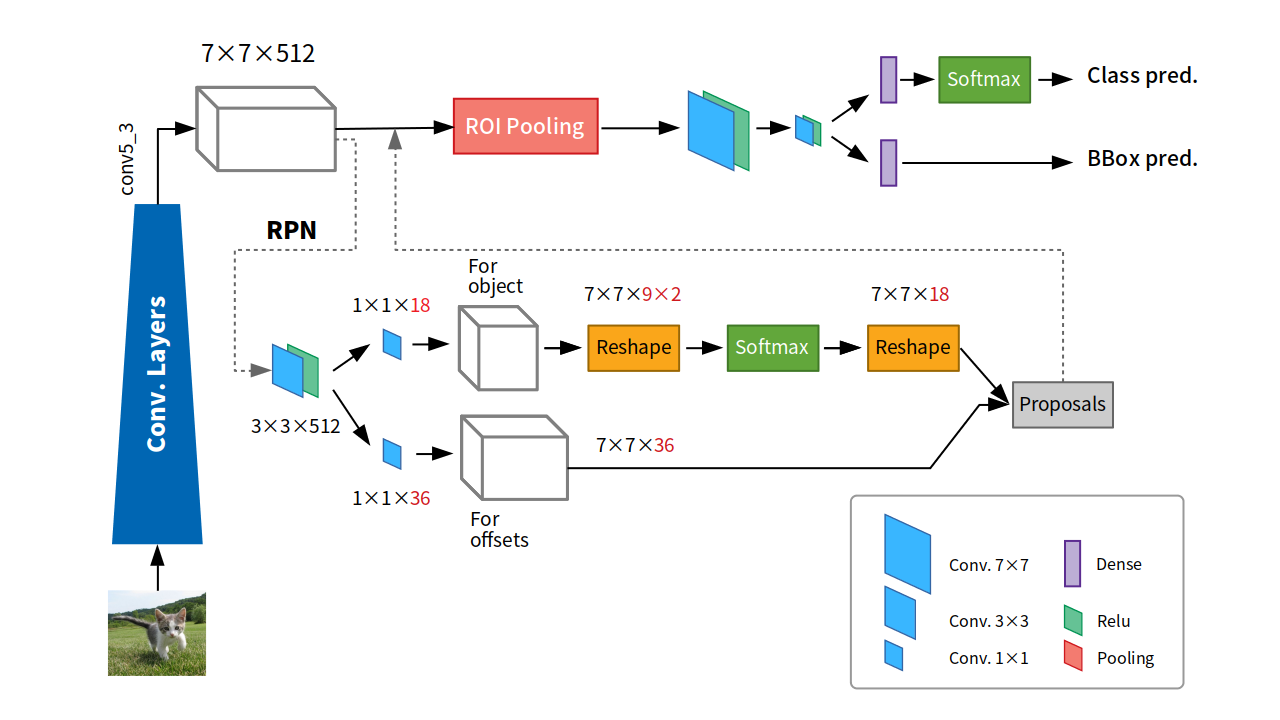
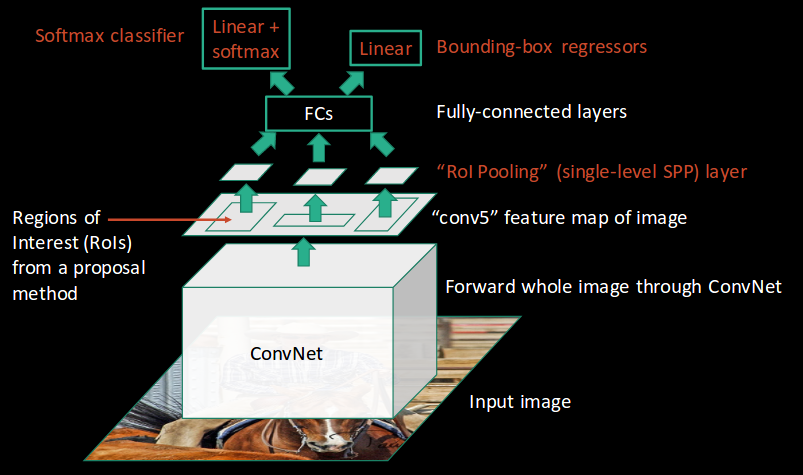
前言 前一篇我們提到了Fast R-CNN的改進,包括了減少冗贅的特徵提取動作,將ROI映射到feature maps上,並用ROI pooling 統一維度等等。但是為了迎來更快的偵測速度,在Proposals上的處理也需要納入整個模式的NN之中,一起用convolution來解決。 於是Faster R-CN...
前言 回顧一下RCNN的問題點: 訓練分太多階段 訓練消耗太多硬體資源和時間。因為每次要取BBox的feature vector,都需要將每一張影像的region proposals的執行一次CNN,並且將vector存到硬碟上。 對一張影像進行detection需要47秒的時間(on GPU)
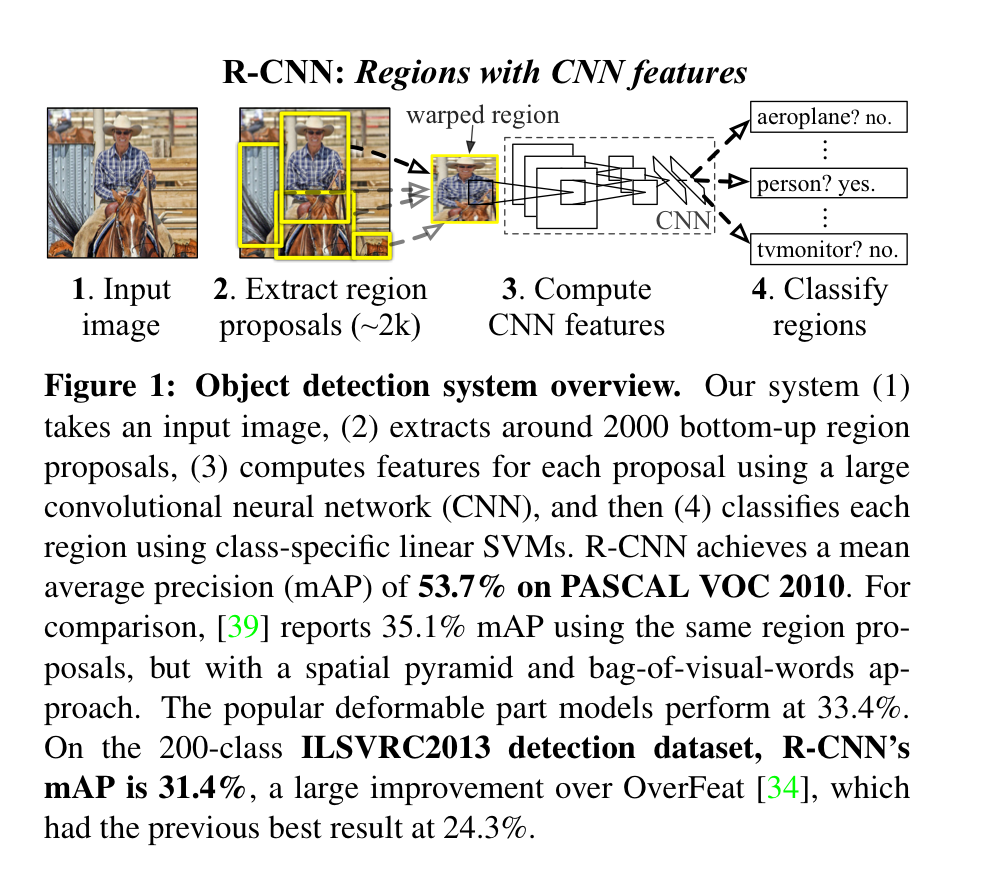
前言 R-CNN可以說是CNN有效應用於物件辨識領域中的一個重要里程碑。它應用region proposal的方法來將這些提案的區域送入CNN抽取特徵,以及後頭的分類、檢測網路中。 在經典的物件辨識競賽PASCAL VOC的2010~2012年之間,競賽的成果發展趨緩。已往利用SIFT、HOG這類的影像識別方法僅...
前言 物件辨識發展到現在,透過我們前面所介紹的這些方法,總算是產生了一個集大成的模型-Mask R-CNN。他集結了Faster R-CNN的two-stage模型,再加上FPN的方法利用不同維度下特徵層級高的feature maps來進行預測,也改良Faster R-CNN中ROI Pooling的缺點,使其邊...
這篇是對 Mask R-CNN 的應用—餅乾辨識器,辨識樂事和多利多滋兩種餅乾的包裝。因為還沒時間換成中文,就直接貼 github 的 README.md 過來先頂一下。
前言 前一篇我們提到了Fast R-CNN的改進,包括了減少冗贅的特徵提取動作,將ROI映射到feature maps上,並用ROI pooling 統一維度等等。但是為了迎來更快的偵測速度,在Proposals上的處理也需要納入整個模式的NN之中,一起用convolution來解決。 於是Faster R-CN...
前言 回顧一下RCNN的問題點: 訓練分太多階段 訓練消耗太多硬體資源和時間。因為每次要取BBox的feature vector,都需要將每一張影像的region proposals的執行一次CNN,並且將vector存到硬碟上。 對一張影像進行detection需要47秒的時間(on GPU)
前言 R-CNN可以說是CNN有效應用於物件辨識領域中的一個重要里程碑。它應用region proposal的方法來將這些提案的區域送入CNN抽取特徵,以及後頭的分類、檢測網路中。 在經典的物件辨識競賽PASCAL VOC的2010~2012年之間,競賽的成果發展趨緩。已往利用SIFT、HOG這類的影像識別方法僅...
前言 物件辨識發展到現在,透過我們前面所介紹的這些方法,總算是產生了一個集大成的模型-Mask R-CNN。他集結了Faster R-CNN的two-stage模型,再加上FPN的方法利用不同維度下特徵層級高的feature maps來進行預測,也改良Faster R-CNN中ROI Pooling的缺點,使其邊...
前言 前一篇我們提到了Fast R-CNN的改進,包括了減少冗贅的特徵提取動作,將ROI映射到feature maps上,並用ROI pooling 統一維度等等。但是為了迎來更快的偵測速度,在Proposals上的處理也需要納入整個模式的NN之中,一起用convolution來解決。 於是Faster R-CN...
前言 回顧一下RCNN的問題點: 訓練分太多階段 訓練消耗太多硬體資源和時間。因為每次要取BBox的feature vector,都需要將每一張影像的region proposals的執行一次CNN,並且將vector存到硬碟上。 對一張影像進行detection需要47秒的時間(on GPU)
前言 R-CNN可以說是CNN有效應用於物件辨識領域中的一個重要里程碑。它應用region proposal的方法來將這些提案的區域送入CNN抽取特徵,以及後頭的分類、檢測網路中。 在經典的物件辨識競賽PASCAL VOC的2010~2012年之間,競賽的成果發展趨緩。已往利用SIFT、HOG這類的影像識別方法僅...
前言 這總算是近期的最後一篇物件偵測論文的介紹文。作者寫這篇論文的時候就提到,他當時沒有繼續花太多心力在改進YOLO系列的演算法上。這次只是稍稍加了一點東西進來,產生YOLO系列的第三代,所以就以比較輕鬆的「技術報告」來呈現他所引入和嘗試的方法。這些改進主要圍繞在邊界框預測、分類預測、backbone網路的改良。
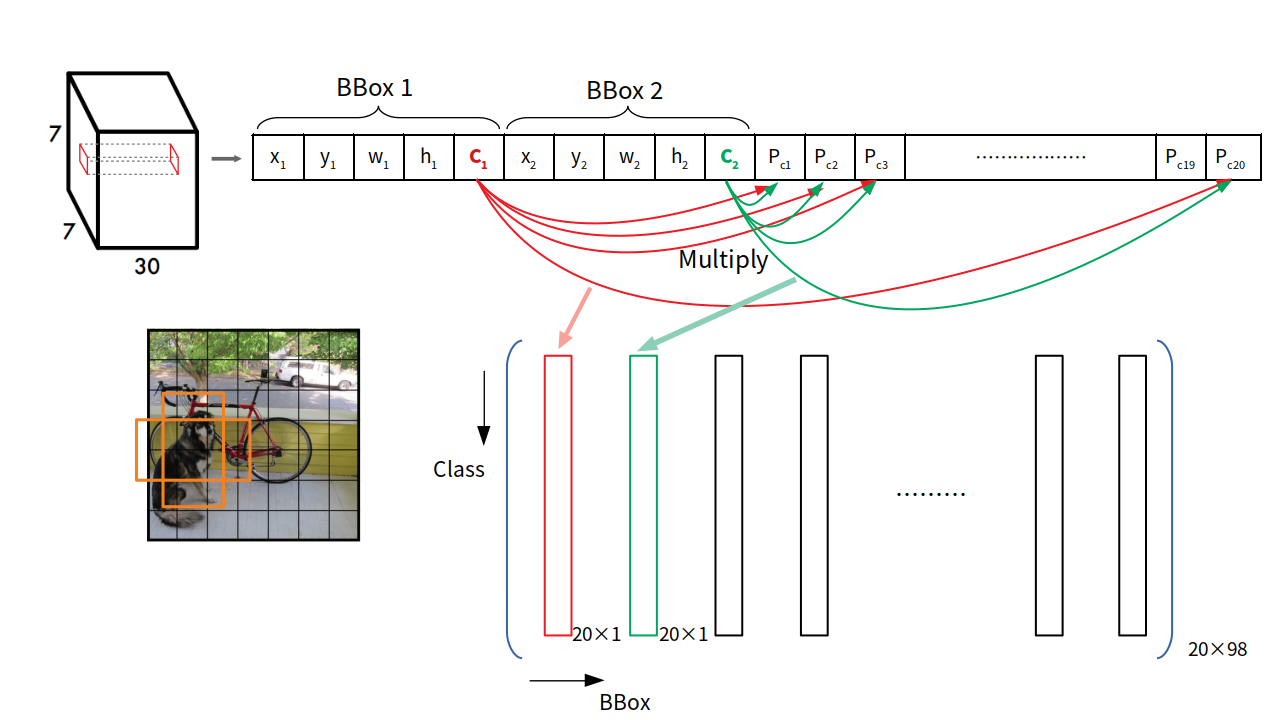
前言 YOLO v1 用非常直覺的方式設計了網路的運作,讓網路從輸出到輸入直接給出分類的機率與邊界框的位置,而且速度遠遠比two stage的模型要快得多。不過準確度卻還差強人意。因此YOLO v2這次參考了Faster R-CNN中anchor的概念而做了改進,也對feature map的使用做了改善。這次我們...
前言 在前面我們曾提過物件辨識現在有one-stage和two-stage兩大類的方法。之前介紹過的R-CNN系列都是屬於two-stage的方法,因為他們都需要先得到region proposal才能對物體進行定位,進而辨別。然而這樣的方法總歸因為多了一層處理proposals的結構,雖然辨識效果很好,但是往往...
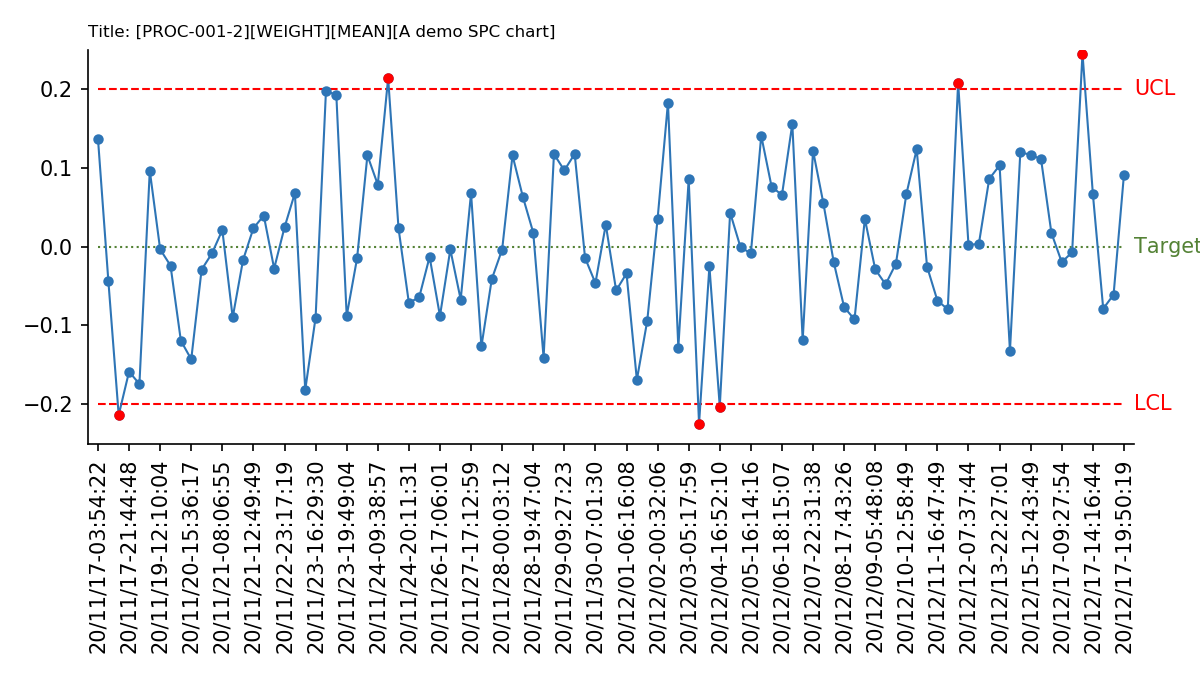
Statistic Process Control (SPC) 因為工作是個製程仔,所以每天最常看到的就是這個叫SPC的東西… SPC中文叫統計製程管制,當然叫SPC比較簡潔乾脆,主要用途是將要監控的參數標準化後,依照時間順序呈現在圖表上,當參數發生異常變動時,可由SPC chart觀察出來, 當工程師發現管制圖...
爬了一堆文,每一篇都有收穫!但是我實際用全新的Ubuntu 18.04,照著reference的文章來試試看時,卻還是不斷踩坑QQ。還好不斷努力之下終於試出一整套完整流程可以把這些事完成,在這邊做個紀錄!
前言 回顧一下RCNN的問題點: 訓練分太多階段 訓練消耗太多硬體資源和時間。因為每次要取BBox的feature vector,都需要將每一張影像的region proposals的執行一次CNN,並且將vector存到硬碟上。 對一張影像進行detection需要47秒的時間(on GPU)
前言 R-CNN可以說是CNN有效應用於物件辨識領域中的一個重要里程碑。它應用region proposal的方法來將這些提案的區域送入CNN抽取特徵,以及後頭的分類、檢測網路中。 在經典的物件辨識競賽PASCAL VOC的2010~2012年之間,競賽的成果發展趨緩。已往利用SIFT、HOG這類的影像識別方法僅...
前言 前一篇我們提到了Fast R-CNN的改進,包括了減少冗贅的特徵提取動作,將ROI映射到feature maps上,並用ROI pooling 統一維度等等。但是為了迎來更快的偵測速度,在Proposals上的處理也需要納入整個模式的NN之中,一起用convolution來解決。 於是Faster R-CN...
前言 回顧一下RCNN的問題點: 訓練分太多階段 訓練消耗太多硬體資源和時間。因為每次要取BBox的feature vector,都需要將每一張影像的region proposals的執行一次CNN,並且將vector存到硬碟上。 對一張影像進行detection需要47秒的時間(on GPU)
前言 這總算是近期的最後一篇物件偵測論文的介紹文。作者寫這篇論文的時候就提到,他當時沒有繼續花太多心力在改進YOLO系列的演算法上。這次只是稍稍加了一點東西進來,產生YOLO系列的第三代,所以就以比較輕鬆的「技術報告」來呈現他所引入和嘗試的方法。這些改進主要圍繞在邊界框預測、分類預測、backbone網路的改良。
前言 在前面我們曾提過物件辨識現在有one-stage和two-stage兩大類的方法。之前介紹過的R-CNN系列都是屬於two-stage的方法,因為他們都需要先得到region proposal才能對物體進行定位,進而辨別。然而這樣的方法總歸因為多了一層處理proposals的結構,雖然辨識效果很好,但是往往...
前言 物件辨識發展到現在,透過我們前面所介紹的這些方法,總算是產生了一個集大成的模型-Mask R-CNN。他集結了Faster R-CNN的two-stage模型,再加上FPN的方法利用不同維度下特徵層級高的feature maps來進行預測,也改良Faster R-CNN中ROI Pooling的缺點,使其邊...
這篇是對 Mask R-CNN 的應用—餅乾辨識器,辨識樂事和多利多滋兩種餅乾的包裝。因為還沒時間換成中文,就直接貼 github 的 README.md 過來先頂一下。
前言 這總算是近期的最後一篇物件偵測論文的介紹文。作者寫這篇論文的時候就提到,他當時沒有繼續花太多心力在改進YOLO系列的演算法上。這次只是稍稍加了一點東西進來,產生YOLO系列的第三代,所以就以比較輕鬆的「技術報告」來呈現他所引入和嘗試的方法。這些改進主要圍繞在邊界框預測、分類預測、backbone網路的改良。
前言 YOLO v1 用非常直覺的方式設計了網路的運作,讓網路從輸出到輸入直接給出分類的機率與邊界框的位置,而且速度遠遠比two stage的模型要快得多。不過準確度卻還差強人意。因此YOLO v2這次參考了Faster R-CNN中anchor的概念而做了改進,也對feature map的使用做了改善。這次我們...
前言 這總算是近期的最後一篇物件偵測論文的介紹文。作者寫這篇論文的時候就提到,他當時沒有繼續花太多心力在改進YOLO系列的演算法上。這次只是稍稍加了一點東西進來,產生YOLO系列的第三代,所以就以比較輕鬆的「技術報告」來呈現他所引入和嘗試的方法。這些改進主要圍繞在邊界框預測、分類預測、backbone網路的改良。
前言 拖了很久才繼續產出新的介紹文分享給大家。這次要來說說物件辨識發展的過程中也佔有一席之地的Semantic Segmentation是什麼,以及這其中代表的方法—Fully Convolutional Networks (FCN)是怎麼透過全卷積的網路來實現這個目標的。 論文: Fully convoluti...
爬了一堆文,每一篇都有收穫!但是我實際用全新的Ubuntu 18.04,照著reference的文章來試試看時,卻還是不斷踩坑QQ。還好不斷努力之下終於試出一整套完整流程可以把這些事完成,在這邊做個紀錄!
爬了一堆文,每一篇都有收穫!但是我實際用全新的Ubuntu 18.04,照著reference的文章來試試看時,卻還是不斷踩坑QQ。還好不斷努力之下終於試出一整套完整流程可以把這些事完成,在這邊做個紀錄!
爬了一堆文,每一篇都有收穫!但是我實際用全新的Ubuntu 18.04,照著reference的文章來試試看時,卻還是不斷踩坑QQ。還好不斷努力之下終於試出一整套完整流程可以把這些事完成,在這邊做個紀錄!
爬了一堆文,每一篇都有收穫!但是我實際用全新的Ubuntu 18.04,照著reference的文章來試試看時,卻還是不斷踩坑QQ。還好不斷努力之下終於試出一整套完整流程可以把這些事完成,在這邊做個紀錄!
爬了一堆文,每一篇都有收穫!但是我實際用全新的Ubuntu 18.04,照著reference的文章來試試看時,卻還是不斷踩坑QQ。還好不斷努力之下終於試出一整套完整流程可以把這些事完成,在這邊做個紀錄!
前言 前一篇我們提到了Fast R-CNN的改進,包括了減少冗贅的特徵提取動作,將ROI映射到feature maps上,並用ROI pooling 統一維度等等。但是為了迎來更快的偵測速度,在Proposals上的處理也需要納入整個模式的NN之中,一起用convolution來解決。 於是Faster R-CN...
這篇是對 Mask R-CNN 的應用—餅乾辨識器,辨識樂事和多利多滋兩種餅乾的包裝。因為還沒時間換成中文,就直接貼 github 的 README.md 過來先頂一下。
前言 YOLO v1 用非常直覺的方式設計了網路的運作,讓網路從輸出到輸入直接給出分類的機率與邊界框的位置,而且速度遠遠比two stage的模型要快得多。不過準確度卻還差強人意。因此YOLO v2這次參考了Faster R-CNN中anchor的概念而做了改進,也對feature map的使用做了改善。這次我們...
前言 YOLO v1 用非常直覺的方式設計了網路的運作,讓網路從輸出到輸入直接給出分類的機率與邊界框的位置,而且速度遠遠比two stage的模型要快得多。不過準確度卻還差強人意。因此YOLO v2這次參考了Faster R-CNN中anchor的概念而做了改進,也對feature map的使用做了改善。這次我們...
前言 在two-stage模型中,雖然發展到了Faster R-CNN利用兩個網路來進行物件偵測已經相當成熟,但是網路的架構龐大、構造複雜,運算時間也是難以達到真正的real-time運用。而SSD作為一個在2016年發表的相當經典的one-stage模型,一樣透過一個一條龍的完成物件的分類和定位。他用的方法也是...
前言 在two-stage模型中,雖然發展到了Faster R-CNN利用兩個網路來進行物件偵測已經相當成熟,但是網路的架構龐大、構造複雜,運算時間也是難以達到真正的real-time運用。而SSD作為一個在2016年發表的相當經典的one-stage模型,一樣透過一個一條龍的完成物件的分類和定位。他用的方法也是...
前言 拖了很久才繼續產出新的介紹文分享給大家。這次要來說說物件辨識發展的過程中也佔有一席之地的Semantic Segmentation是什麼,以及這其中代表的方法—Fully Convolutional Networks (FCN)是怎麼透過全卷積的網路來實現這個目標的。 論文: Fully convoluti...
前言 不同的物體或他們的特徵在不同的影像上或是在影像中的大小(或尺度)都有所不同,所以當我們在進行影像的工作時,只在單一個尺度下進行影像處裡或是特徵提取,往往會是不夠的。因此,影像金字塔一直都是解決不同尺度的問題時常用的手段。而在深度學習基底上的物件偵測模型,要實際運用或參加競賽時,往往也都倚賴將整個模型與影像金...
前言 物件辨識發展到現在,透過我們前面所介紹的這些方法,總算是產生了一個集大成的模型-Mask R-CNN。他集結了Faster R-CNN的two-stage模型,再加上FPN的方法利用不同維度下特徵層級高的feature maps來進行預測,也改良Faster R-CNN中ROI Pooling的缺點,使其邊...
前言 這總算是近期的最後一篇物件偵測論文的介紹文。作者寫這篇論文的時候就提到,他當時沒有繼續花太多心力在改進YOLO系列的演算法上。這次只是稍稍加了一點東西進來,產生YOLO系列的第三代,所以就以比較輕鬆的「技術報告」來呈現他所引入和嘗試的方法。這些改進主要圍繞在邊界框預測、分類預測、backbone網路的改良。
Statistic Process Control (SPC) 因為工作是個製程仔,所以每天最常看到的就是這個叫SPC的東西… SPC中文叫統計製程管制,當然叫SPC比較簡潔乾脆,主要用途是將要監控的參數標準化後,依照時間順序呈現在圖表上,當參數發生異常變動時,可由SPC chart觀察出來, 當工程師發現管制圖...
Statistic Process Control (SPC) 因為工作是個製程仔,所以每天最常看到的就是這個叫SPC的東西… SPC中文叫統計製程管制,當然叫SPC比較簡潔乾脆,主要用途是將要監控的參數標準化後,依照時間順序呈現在圖表上,當參數發生異常變動時,可由SPC chart觀察出來, 當工程師發現管制圖...
Statistic Process Control (SPC) 因為工作是個製程仔,所以每天最常看到的就是這個叫SPC的東西… SPC中文叫統計製程管制,當然叫SPC比較簡潔乾脆,主要用途是將要監控的參數標準化後,依照時間順序呈現在圖表上,當參數發生異常變動時,可由SPC chart觀察出來, 當工程師發現管制圖...